
Resident AUV
The resident AUV (Autonomous Underwater Vehicle) project consists in developing an observation vehicle based on and returning from a cabled seabed observation infrastructure, to extend the range of spatial observation. It represents the mobile extension of a permanent fixed-point underwater observation system.
Why?
The main competitive advantage of fixed-point underwater observatories is their ability to acquire long-term data series. However, their spatial coverage is, by design, limited to the range of their instruments, and therefore highly variable depending on the variables measured.
On the other hand, the mobility of AUVs gives them the ability to observe a large spatial area. Yet, as they are operated and supervised from a ship, their observation time is limited. In practice, this timeframe does not exceed a few days or weeks, whereas a fixed-point observatory can acquire measurements for over a year without any human intervention.
Therefore, making an AUV capable of carrying out successive missions without ship assistance, departing and returning from a fixed submarine station, will simultaneously offer the best of both technologies: an acquisition of long-time data series over an extended spatial coverage.
In addition to the extended duration of observation, the permanent nature of the resident AUV also constitutes an important asset, enabling us to "be there at the right time", i.e. to capture unforeseen events or phenomena. It will be possible, for instance, to trigger the departure on a mission of a resident AUV following the detection of a landslide or of seismic activity. This would take just a few minutes, whereas it would take several days or weeks before a ship-based observation vehicle would be ready for deployment.
State of the art
In the world of academia, there are no references to the long operation of an observation device from a seabed base. Industrial investment in this area has begun and is progressing rapidly, aiming to become capable of monitoring and maintaining marine and subsea industrial installations without the need for a ship, operating from a shore-based control room. In addition, the residence of mobile vehicles also attracts the defence industry's interest for surveillance purposes.
What are the main technological challenges?
The first challenge is to design a system - the vehicle and its docking base - that can operate for several weeks or even months without any local human intervention.
Indeed, the long-term immersion of a system exposes it to harsh marine environments, with corrosion, degradation or waterlogging of certain materials, fouling caused by the accumulation of sediments, and biofouling due to marine organisms colonizing exposed surfaces. All this fouling, as it accumulates over time, makes the gear's mass and density vary in an uncontrolled way. It particularly affects the functioning of optical devices (cameras, projectors, optical targets), and can even occupy or alter crucial surfaces that need to remain clear for docking the vehicle to its base.
The long-term operation of the system without local human intervention also requires unfailing reliability. At the software level, for example, there can be no human intervention to restart the machine, as you might have to do with a computer or telephone when something is not functioning properly. Generally speaking, the probabilities and consequences of failure of each subsystem must be rigorously analyzed to minimize their impact on the whole system, and anticipate their mitigation or switch to a degraded mode to guarantee its safety.
A second challenge is to ensure that the vehicle returns to its base at the end of each mission. This relies on the permanent positioning of the AUV in relation to its base, and its ability to return to it, whether at the scheduled end of a mission or in the event of an emergency, regardless of the current and visibility conditions encountered. Once close to the docking station, the final approach and docking maneuver must also achieve a 100% success rate, under any conditions.
How can this be achieved?
The aim is now to prove the long-term feasibility of the residence, and to open up new prospects for in situ observation. The first vehicle, under study as part of Ifremer's ScInObs project, will therefore be deliberately limited in payload, while still meeting several scientific use cases:
- Monitoring benthic ecosystems,
- Characterization of benthic habitats and biodiversity monitoring,
- Observation of fluid emissions and eruptive events.
The following sensors are being considered for these use cases:
- HD stereo camera and projectors
- CTD (Conductivity, Temperature, Depth)
- Oxygen sensor
- Turbidimeter
- ADCP (Acoustic Doppler Current Profiler) 1 MHz
Use cases also determine the device's operating conditions, namely the depth, geometry and kinematics of its paths, the current and turbidity values encountered, etc. These parameters, and the payload to be carried, determine the device's volume, weight and electrical capacity. Apart from the payload, the main components to be developed or qualified, and then integrated into the vehicle or its docking station, are :
- The battery and its charge management system (Battery Management System),
- A contactless power and data transmission system between the docking station and the AUV,
- Locking mechanism to secure the AUV to the docking station,
- Navigation sensors,
- Weighing adjustment system,
- Motors, variators, thrusters and their control mechanisms.
Current status of the project
An initial dimensioning of the vehicle has been carried out. Its shape and propulsion architecture have been drafted.
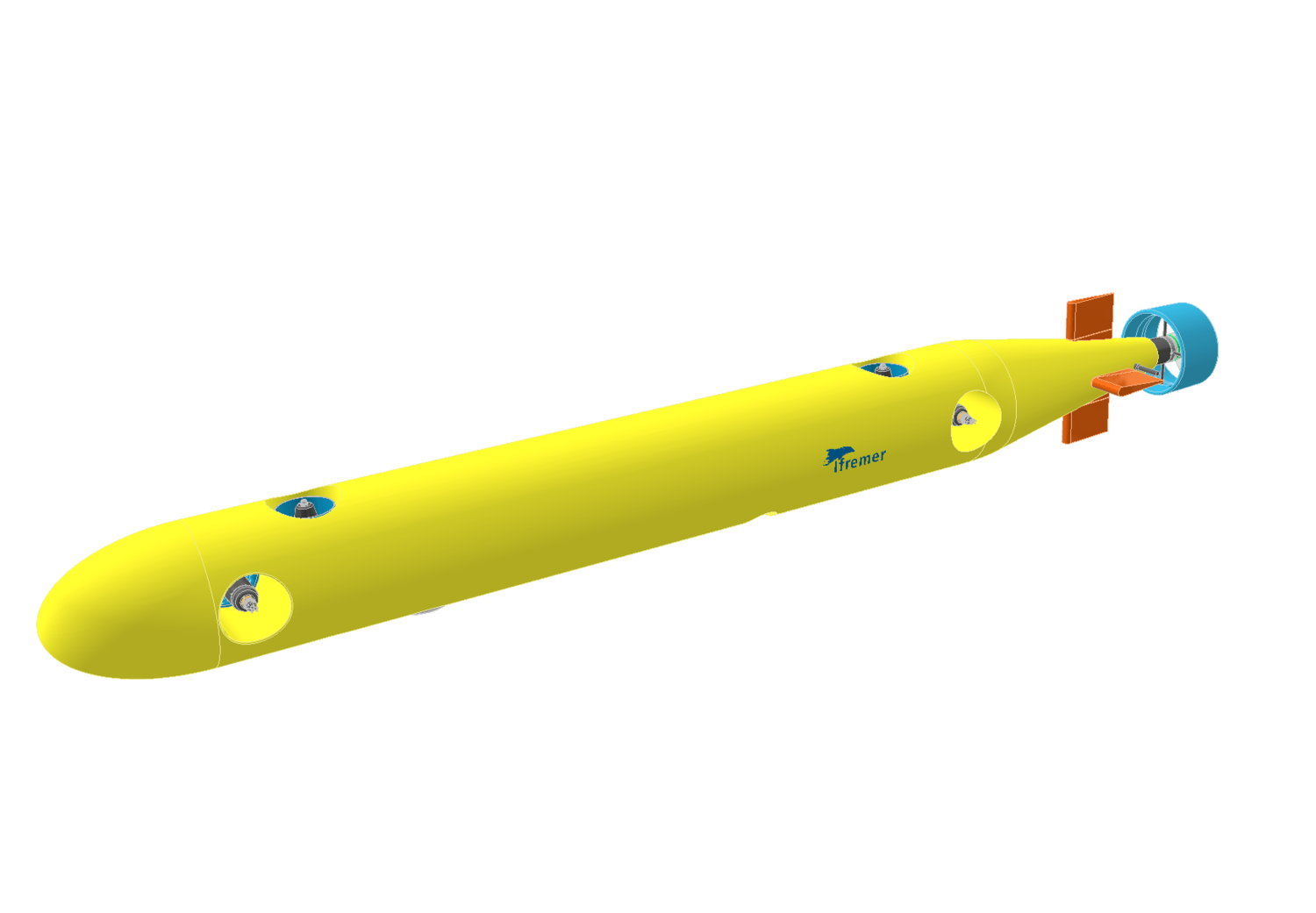
First sketch of the shape of a resident AUV – © Damien Le Vourc’h, IFREMER
The above-mentioned subsystems are either under development or under qualification. The multi-sensor fusion software for positioning and navigation is currently being improved. The secure docking function is being tested in a basin.
Another specific aspect of this project is that it requires a huge amount of testing, first in basins then at sea, at increasingly greater depths and over longer periods of time. It's a long and costly process, but a vital one.
 Sequence of tests and validation of the resident AUV
Sequence of tests and validation of the resident AUV
The project's team
Jérôme Blandin, Aurélien Arnaubec, Adrien Chauvet, Maxime Ferrera, Morgann Le Bot, Damien Le Vourc’h, Julien Legrand, Nicolas Mertz, Patrick Rousseaux – IFREMER
References
Delaney, J.R., D.A. Manalang, A. Marburg, A. Nawaz, and K. Daly. Report of the Resident AUV Workshop, 9–11 May 2018. APL-UW TR 1901, Technical Report, Applied Physics Laboratory, University of Washington, Seattle, March 2020, 84 pp.
D. Manalang, J. Delaney, A. Marburg and A. Nawaz, "Resident AUV Workshop 2018: Applications and a Path Forward," 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 2018, pp. 1-6, doi: 10.1109/AUV.2018.8729720
J. Albiez et al., "FlatFish - a compact subsea-resident inspection AUV," OCEANS 2015 - MTS/IEEE Washington, Washington, DC, USA, 2015, pp. 1-8, doi: 10.23919/OCEANS.2015.7404442.