
Profileur en point fixe « PROLIXE »
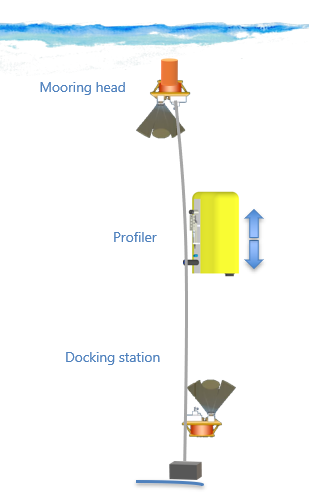
Le projet de profileur en point fixe (dénommé PROLIXE) vise à développer un système de mesure et d’observation ayant la capacité de se déplacer entre le fond de la mer (jusqu’à 4000 m) et la sub-surface, le long d’une ligne de mouillage ancrée, de manière à caractériser l’ensemble de la colonne d’eau à une position géographique donnée. Ce système doit avoir la capacité de recharger ses batteries à intervalles réguliers sur une station d’accueil pour lui offrir une grande autonomie.
Pourquoi ?
Les systèmes actuels d’observation de la colonne d’eau en point fixe se répartissent globalement en deux catégories : les mouillages océanographiques et les systèmes profileurs ancrés.
Les mouillages océanographiques à capteurs fixes et autonomes peuvent avoir une très grande extension verticale et une autonomie supérieure à un an. Cependant, la distance entre les capteurs ne permet d’échantillonner la colonne d’eau que de manière partielle. En outre, la fréquence d’acquisition des capteurs étant figée et optimisée pour augmenter leur autonomie, il est possible de passer à côté d’évènements d’importance scientifique.
Les systèmes profileurs ancrés sont, dans leur grande majorité, munis d’un câble enroulé sur un treuil leur permettant de faire varier l’immersion des capteurs. Ce mode de fonctionnement limite leur extension verticale à 300 mètres environ. L’unique type de profileur offrant une couverture spatiale similaire à celle des mouillages océanographiques se déplace le long d’une ligne ancrée et tendue par une bouée de subsurface et embarque sa batterie. Son autonomie et sa charge utile sont donc limitées. De plus, le vecteur étant sensible à la vitesse du courant, sa capacité à réaliser des profils dans toutes les conditions s’en trouve fortement réduite.
Ainsi, offrir à un système profileur à ligne tendue la capacité de recharger sa batterie, tout en améliorant la robustesse de son système de déplacement permettra aux utilisateurs d’observer toute la colonne d’eau et d’y effectuer des mesures représentatives sur du long terme.
Enfin, la possibilité de piloter tous les capteurs par un unique système embarqué intelligent permettra au profileur d’adapter ses profils en temps réel et d’acquérir des données ciblées.
Enjeux
Ce projet représente une évolution par rapport à l’état de l’art industriel, actuellement limité par l’autonomie du vecteur, et s’appuie sur une faisabilité académique démontrée par le prototype basé sur produit du commerce modifié par l’université de Washington. La mise à disposition de la communauté scientifique de ce nouvel équipement permettra d’ouvrir de nouvelles perspectives en matière d’observation in situ. De plus, la résidence d’engins mobiles intéresse également le domaine de la défense pour des sujets de surveillance.
Quels sont les principaux verrous technologiques ?
Pour parvenir à développer un système capable de répondre à ces différents enjeux, un certain nombre de challenges technologiques devra être relevé et nécessitera des efforts de recherche et développement spécifiques.
Le premier défi est lié à la durée d’opération sans maintenance : le système se doit d’être fiable, c’est-à-dire qu’il doit résister aux agressions du milieu marin, telles que la prise d’eau, la pression hydrostatique ou la corrosion. Le développement de bio-salissures, telles les algues et les petits organismes marins, doit également être limité au niveau des zones critiques de l’équipement, comme sur le câble-guide, la station d’accueil ou sur certains capteurs. Le système de déplacement est, lui, pensé pour permettre au profileur de parcourir une très grande distance (jusqu'à 9000 km) sans usure notable
La capacité de réaliser des mesures dans l’ensemble de la colonne d’eau sur une durée supérieure à un an est directement liée à la possibilité pour le profileur de recharger sa batterie sur sa station d’accueil. Cette opération ajoute une forte complexité au système mais lui permet de s’affranchir d’une batterie embarquée trop volumineuse.
L’absence de supervision humaine pour exécuter ses missions est un autre challenge. En effet, outre le fait de devoir adapter ses profils en fonction des données relevées par ses capteurs, le profileur doit être en capacité de gérer un évènement anormal en se mettant en sécurité sur sa station d’accueil.
Pour terminer, le système perd de sa pertinence s’il n’est pas en mesure de se déplacer dans la majeure partie des conditions environnementales rencontrées. Il doit donc être capable de réaliser ses missions en présence de courant marin.
Comment ?
La phase de développement du système amènera à la production d’un prototype qui sera en mesure de répondre à des cas d’usage scientifiques identifiés et déployable sur différents sites.
Pour y parvenir, il proposera plusieurs configurations de capteurs :
- Configuration de base : CTD, optode, turbidimètre, courantomètre ponctuel
- Configuration de base + biologie et halieutique : Caméra UVP, préleveur eDNA
- Configuration de base + géochimie : capteur CH4, capteur pCO2, capteur pH et rédox
A ces configurations de capteurs embarqués sur le profileur seront associés des capteurs fixes à longue portée, comme des ADCPs (Acoustic Doppler Current Profiler) ou des écho-sondeurs, placés sur la station d’accueil ou sur la bouée de sub-surface (en haut de la ligne de mouillage).
Ce prototype sera amené à être produit à plusieurs exemplaires, qui pourront être déployés simultanément sur plusieurs sites d’étude, les seuls composants uniques à chaque site étant la ligne de mouillage dont la longueur dépend de la profondeur, et le lest qui permet à la ligne de mouillage de rester en point fixe.
État du projet
A preliminary project has determined the profiler's movement mode and chosen the type of connection between the docking station and the profiler, enabling its batteries to be recharged and data to be exchanged.
The shape of the docking station is currently being finalized, but that of the profiler has yet to be studied.
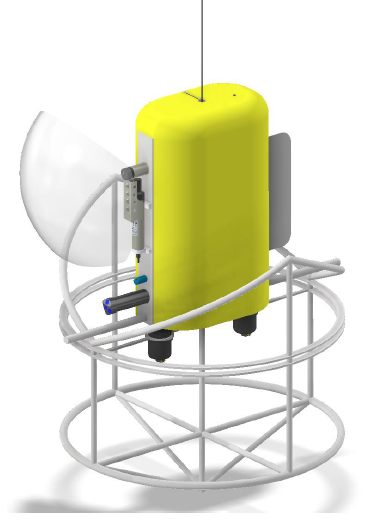
Vue d'une pré-étude du profileur en point fixe PROLIXE - © Tristan Youinou IFREMER
Des simulations hydrodynamiques et la prise en compte des moyens navals susceptibles d’être utilisés pour le déploiement et la récupération de l’ensemble du système ont permis de dimensionner le câble de la ligne et son flotteur sub-surface.
Les autres blocs fonctionnels en cours de développement sont les suivants :
- Liaison lest-station d’accueil
- Liaison profileur-station d’accueil
- Liaison profileur-ligne
- Système de déplacement
- Algorithmie de pilotage du profileur et des capteurs
- Stockage d’énergie
La validation de ces différents blocs nécessite de nombreuses heures d’essais.
Chaque sous-ensemble devra d’abord être testé en laboratoire ou en atelier, puis en caisson hyperbare afin de valider son fonctionnement sous pression hydrostatique.
Une fois ces phases validées, le système pourra être assemblé et commencer les phases de test en fonctionnement :
- Des essais en bassin devront permettre de valider les différentes actions à mener par le profileur dans des conditions idéales
- Des essais en mer par faibles fonds viseront à vérifier le comportement du système dans des conditions difficiles de courant, de houle et en présence de développement de bio-salissures sur quelques jours
- Enfin, des essais en mer par grands fonds achèveront les phases de test, en permettant de vérifier le bon fonctionnement du système dans des conditions réelles, sur plusieurs mois.
C’est uniquement une fois ces essais réalisés que le profileur en point fixe PROLIXE sera prêt à être déployé pour sa première mission scientifique, prévue à proximité de la Nouvelle-Calédonie, en 2026, dans le cadre du projet ScInObs.
Références
Daniel F. Carlson, Alexander G. Ostrovskii, Konstantin Kebkal, and Hezi Gildor. “Moored automatic mobile profilers and their applications ». 2013
T. McGinnis, N. Michel-Hart, M. Mathewson, T. Shanahan. “Deep Profiler for the Ocen Observatories Initiative Regional Scale Nodes: Rechargeable, Adaptive, ROV Serviciable”. 2013.